
Lost in Space: How a Satellite Knows Where It Is and Where It’s Pointing
The Complete Guide to Satellite Attitude, Position, and Autonomous Survival

A satellite separates from its rocket 500 km above the Earth, tumbling slowly end over end in total darkness. It has no idea where it is, which way it’s facing, or where the Sun is. Its solar panels are starved for light, its antenna is pointed at empty space, and its battery is draining. In the next few minutes it has to do something almost miraculous: figure out — entirely on its own — exactly where it is in orbit and which direction every face of its body is pointing, then twist itself around to catch the Sun. How does a machine do that? This is the complete story of how a satellite finds itself — using gyroscopes, sun sensors, star cameras, magnetic fields, dead pulsars, and AI — from zero to the bleeding edge.
The One Sentence That Explains Everything
Every satellite, every moment it’s alive, is answering two completely separate questions:
“Where am I?” (its position — its dot on the map of space) and “Which way am I facing?” (its attitude — its orientation, the direction each side is pointed). It measures both, constantly, and then nudges itself to keep its attitude exactly where it needs to be.
That’s the whole job. Everything else in this post is how it pulls off those two measurements — and why they’re far harder, and far more different from each other, than they sound.

The Two Questions People Always Confuse
Imagine you wake up blindfolded in a strange city. Two different questions need answering, and they’re not the same:
Where am I? Which street, which intersection — your dot on the map. This is position.
Which way am I facing? North? Toward the alley? This is orientation — what satellite engineers call attitude.
You could know your exact GPS coordinates and still have no idea which way you’re looking. And you could know you’re facing north while being hopelessly lost. They are independent facts, and — crucially — you measure them with totally different tools. Your phone’s GPS gives you position. A compass gives you orientation. One does not give you the other.
Satellites live with this same split every second:
Position is solved by orbit determination — GPS receivers, ground radar, and the steady clockwork of orbital physics.
Attitude is solved by attitude determination — sun sensors, star cameras, gyroscopes, and magnetic sensors.
And once a satellite knows its attitude, it has to change it — turning to point a camera at a city, an antenna at a ground station, or its panels at the Sun. That third job is attitude control. Put the determination and control together and engineers call the whole system ADCS (Attitude Determination and Control System), or more broadly GNC (Guidance, Navigation, and Control).
Keep the two questions separate in your head — where am I vs which way am I facing — and everything that follows clicks into place.
A Short History: From Spinning Bullets to Star Cameras
The story of how satellites keep their bearings is a story of escaping chaos.
Spin stabilization (the football trick). The earliest satellites used the same trick as a thrown football or a rifle bullet: spin. A spinning body resists being knocked off-axis — gyroscopic stiffness. Set the satellite spinning and it holds its orientation in space like a top. Simple, passive, no computer needed.
Explorer 1’s embarrassing surprise (1958). America’s first satellite, Explorer 1, was designed to spin neatly about its long, pencil-like axis. Within a single orbit, it did something nobody expected: it flipped into an end-over-end flat spin. The culprit was its four flexible whip antennas — they flexed as it spun, quietly bleeding off energy. And here’s the iron law of physics that bit them: a flexible spinning object will always drift toward spinning about the axis with the most inertia (the “fat” tumbling axis), not the least. Explorer 1 taught engineers the hard way that real satellites aren’t rigid — and that attitude is not something you can just set and forget.
Gravity-gradient booms (let the Earth do it). A clever passive fix: extend a long boom, and Earth’s gravity — very slightly stronger on the near end than the far end — gently tugs the satellite into pointing at the planet, like a weighted buoy standing upright in water. Free, but only roughly accurate.
3-axis stabilization (the modern standard). Today almost all satellites are 3-axis stabilized: instead of spinning, they hold a fixed, controlled orientation on all three axes using active sensors and actuators (which we’ll meet soon). This is what lets a telescope stare at one galaxy for hours or a camera lock onto a precise spot on Earth.
The ongoing saga. Even the best systems fail. The Hubble Space Telescope has fought gyroscope failures for decades — gyros died in 1997, 1998, and 1999; astronauts replaced all six in 2009; and it has dropped into safe mode over gyro trouble as recently as 2023. Keeping a satellite’s bearings is not a solved problem you install once. It’s a fight that lasts the whole mission.
“Where Am I?” Starts With Physics, Not Sensors
Here’s the first surprise about position: a satellite mostly doesn’t need to measure it constantly — because physics predicts it.
A satellite isn’t flying; it’s falling. An orbit is just a fall that keeps missing the Earth: gravity pulls the satellite down, but it’s moving sideways so fast (about 7.8 km/s in low orbit) that the ground curves away beneath it just as fast as it falls. The result is a stable, endlessly repeating loop.
And falling is predictable. If you know a satellite’s exact position and velocity at one instant — its “state” — the laws of gravity let you calculate where it will be hours or days later, the same way astronomers predict eclipses centuries in advance. This calculation is called propagation.
So the real task of “where am I” isn’t continuous measurement — it’s: (1) pin down the state accurately once in a while, and (2) let the math carry it forward in between. The catch is that the prediction slowly drifts — thin atmospheric drag, the Sun’s pressure, the Moon’s tug, the Earth’s lumpy gravity field all nudge the satellite off the ideal path. So you have to re-measure periodically to correct the drift. The next sections are about how that measurement is actually done — and, critically, how it changes depending on how high you’re orbiting.

The Positioning Sensors: How a Satellite Fixes Its Own Location
When a satellite does measure its position, it has a small toolkit:
GNSS receiver onboard (space GPS). The most common method today: a satellite carries a GPS receiver, the same fundamental tech as the one in your phone. It listens to the fleet of navigation satellites (GPS, plus Europe’s Galileo, Russia’s GLONASS, China’s BeiDou — collectively GNSS) and trilaterates its position from their timing signals. The twist: a satellite is screaming along at ~7.8 km/s, so its receiver has to handle huge Doppler shifts and lock onto signals far faster than a car navigator ever would. A space-rated GNSS receiver can fix a satellite’s position to within a few meters.
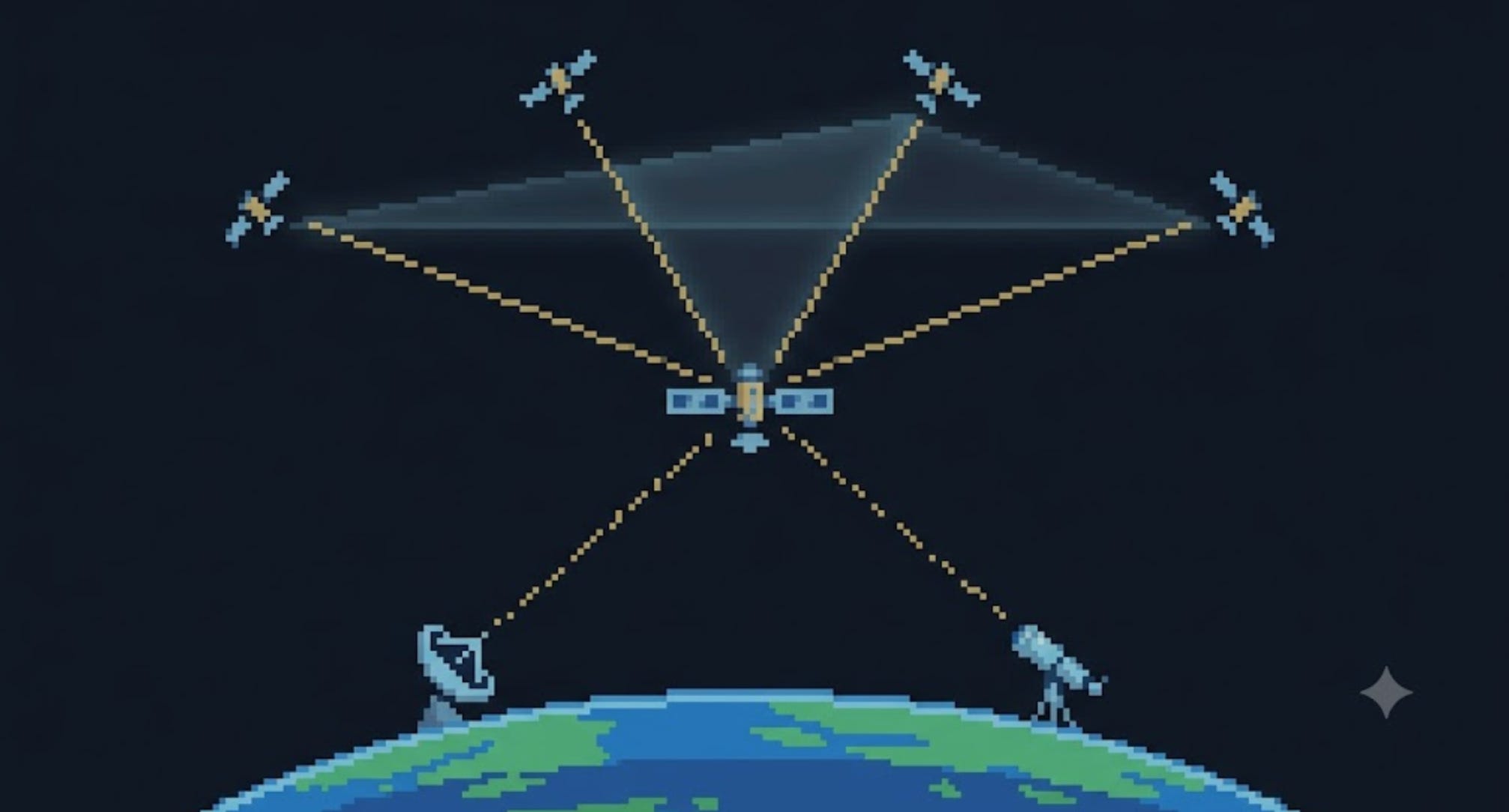
Ground tracking (the world watches you). Even without GPS, the ground can find a satellite. A global web of radar stations and optical telescopes — the US Space Force’s Space Surveillance Network — tracks tens of thousands of objects in orbit. Their measurements are distilled into a compact data format called a TLE (Two-Line Element set): two lines of numbers describing an object’s orbit, which anyone can feed into a propagation model (the standard one is called SGP4) to predict where that object will be. This is how hobbyists know when the ISS will fly over their backyard.
Ranging. A ground station can also send a signal up and time how long the round-trip takes — distance equals time times the speed of light. Combine ranging from a few stations and you get a precise fix. This is the backbone of deep-space navigation.
Inertial dead-reckoning. Between fixes, a satellite can estimate how far it’s moved using onboard motion sensors (an IMU — inertial measurement unit) — the same principle as counting your steps in the dark. It drifts over time, so it’s a stopgap between real fixes, not a standalone answer.
Positioning Changes With Altitude: LEO vs MEO vs GEO vs Beyond
Here’s something most people never realize: how a satellite finds its position depends enormously on how high it’s orbiting. The GPS trick that works perfectly in low orbit barely works at all up high. Here’s the full ladder:
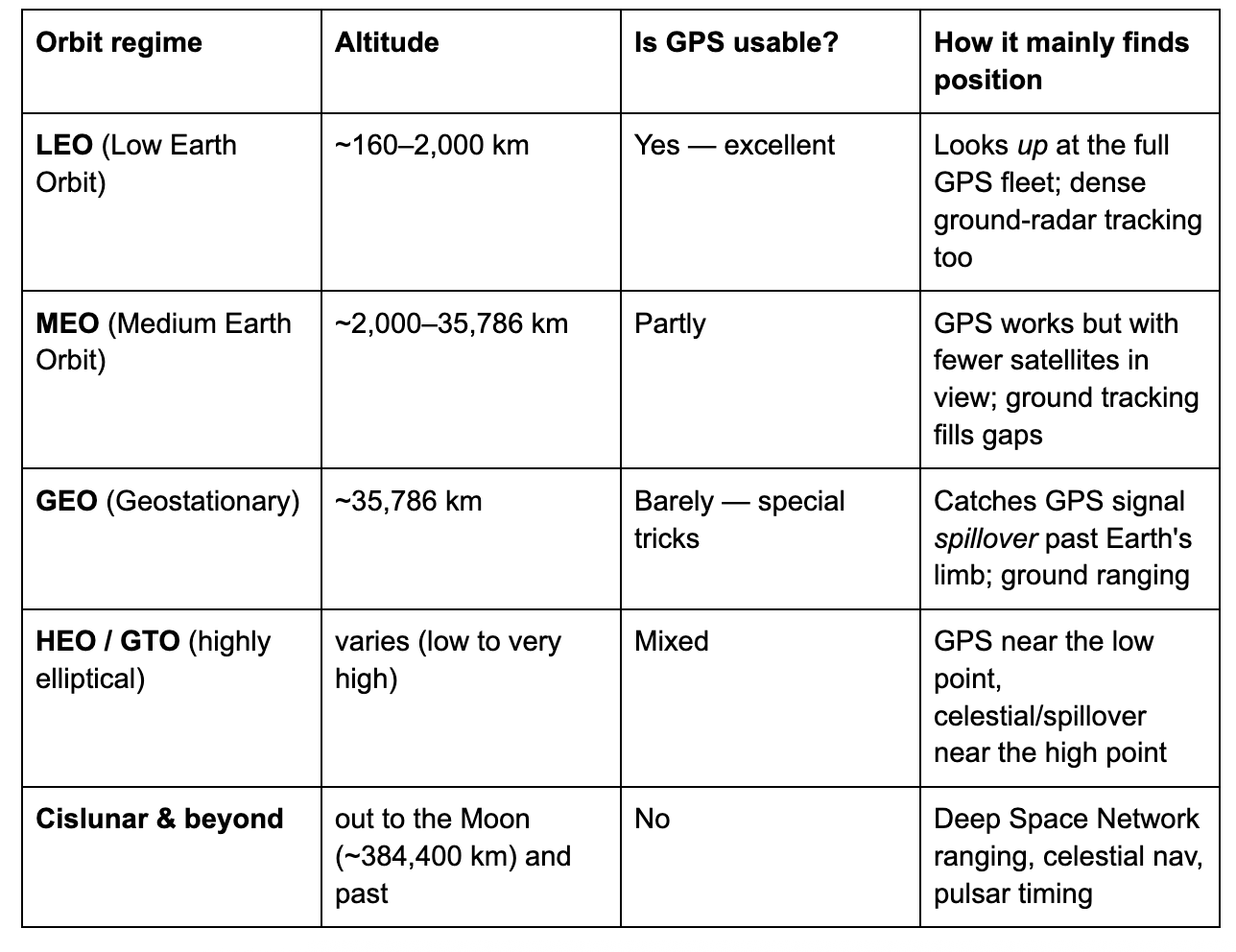
The key insight is about where the GPS constellation lives: the GPS satellites orbit at about 20,200 km (in MEO), and they beam their signals down toward Earth.
In LEO, your satellite is below them, looking up into a sky full of GPS — it works beautifully.
At GEO, your satellite is above the entire GPS constellation. The GPS satellites are now mostly on the far side of the Earth, beaming away from you, with the planet blocking the view. So how does a GEO satellite use GPS at all? With a clever trick: it catches the faint edges of the GPS signal beams that spill past the curve of the Earth — the main beam plus weak “side-lobes” that leak around the planet’s limb. It takes a specialized, super-sensitive high-altitude GNSS receiver, but it works: NASA’s GOES-16 weather satellite was the first to operationally use GPS this way at GEO.
Beyond GPS reach — out toward the Moon and into deep space — GPS is useless, and spacecraft fall back on ground-based ranging from giant antennas (NASA’s Deep Space Network), plus the celestial and pulsar methods we’re about to meet. (This is exactly why “GPS for the Moon” is an active frontier — there’s no satnav out there yet.)
So “how does a satellite know where it is” has no single answer. It depends on which shell of space it’s flying in.

Can a Satellite Navigate by the Stars?
Here’s a question almost everyone asks: the old sailors used the stars — can a satellite just take a picture of the stars and know where it is?
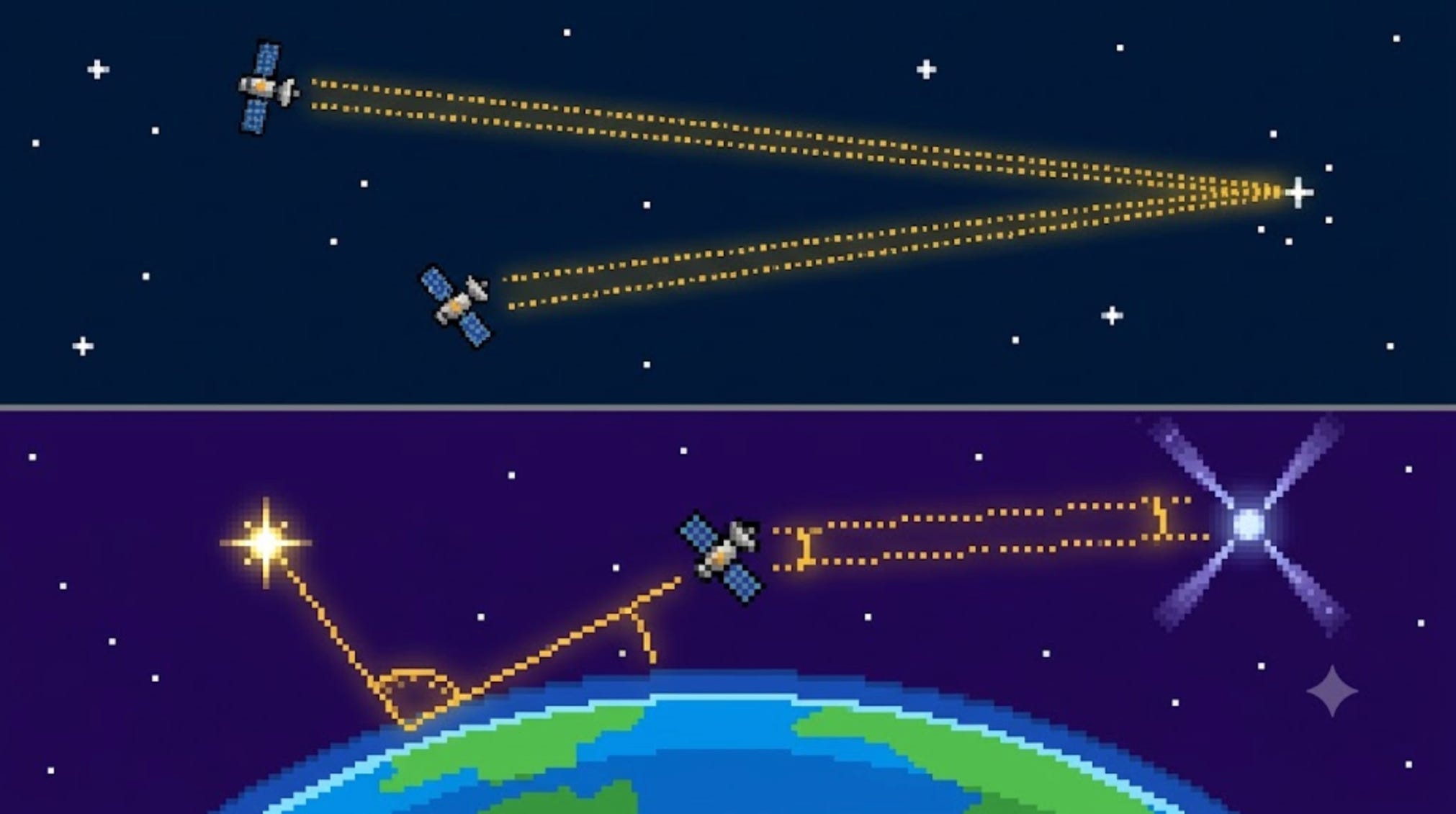
The answer is beautifully subtle, and it’s worth getting exactly right: a picture of the stars tells a satellite which way it’s facing — but NOT where it is.
Why? Because the stars are unimaginably far away. Whether your satellite is over Canada or over Australia, the star field looks identical — the stars don’t visibly shift at all across the width of an orbit (their parallax is far too tiny to measure). So a star photo is a perfect compass: match the pattern of stars in your camera to a catalog, and you know your orientation to within an arc-second. But it’s a useless map: the same star pattern is what you’d see from anywhere in orbit, so it can’t pin your location.
To get position from the sky, you need a second, nearer reference — something close enough that its apparent position actually shifts as you move:
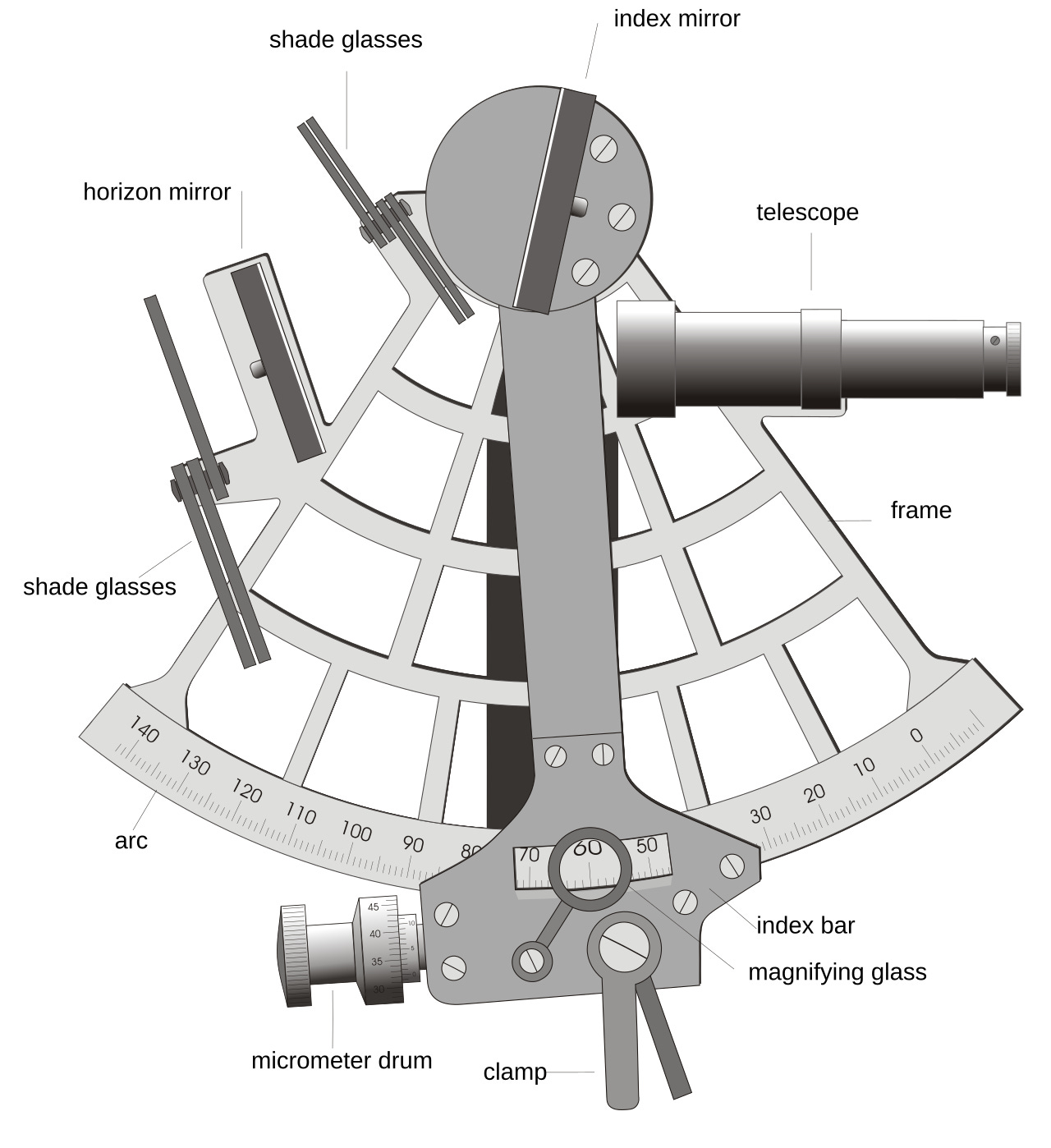
Celestial navigation (the sextant trick). Measure the angle between a star and a nearby body — the edge of the Earth (its “limb”), a planet, or a moon. The stars stay fixed, but the near body slides against them as your position changes — and that shift reveals where you are. NASA’s deep-space probes do exactly this: Deep Space 1 flew an autonomous optical navigation system called AutoNav (the first spacecraft to fix its own position without help from Earth), and OSIRIS-REx used optical navigation, photographing the asteroid Bennu against the background stars to triangulate its approach.
Pulsar navigation — “GPS from dead stars.” This one sounds like science fiction but it’s real. Certain collapsed stars (pulsars) spin and flash beams of X-rays past us with the regularity of an atomic clock. By timing those flashes from several known pulsars, a spacecraft can triangulate its position anywhere in the solar system — no Earth contact needed. NASA proved it in November 2017 with an experiment called SEXTANT, running on the NICER instrument aboard the Space Station: using four millisecond pulsars as beacons, it pinned the station’s position to within about 7 kilometers, purely from starlight.
The mental model to keep: Stars alone = a compass (orientation). A star plus a nearby body, or the ticking of pulsars = a map (position).
And that “compass” use — matching stars to a catalog for orientation — is so good it became the gold standard for attitude. Which brings us to the next question.
“Which Way Am I Facing?” The Attitude Sensors
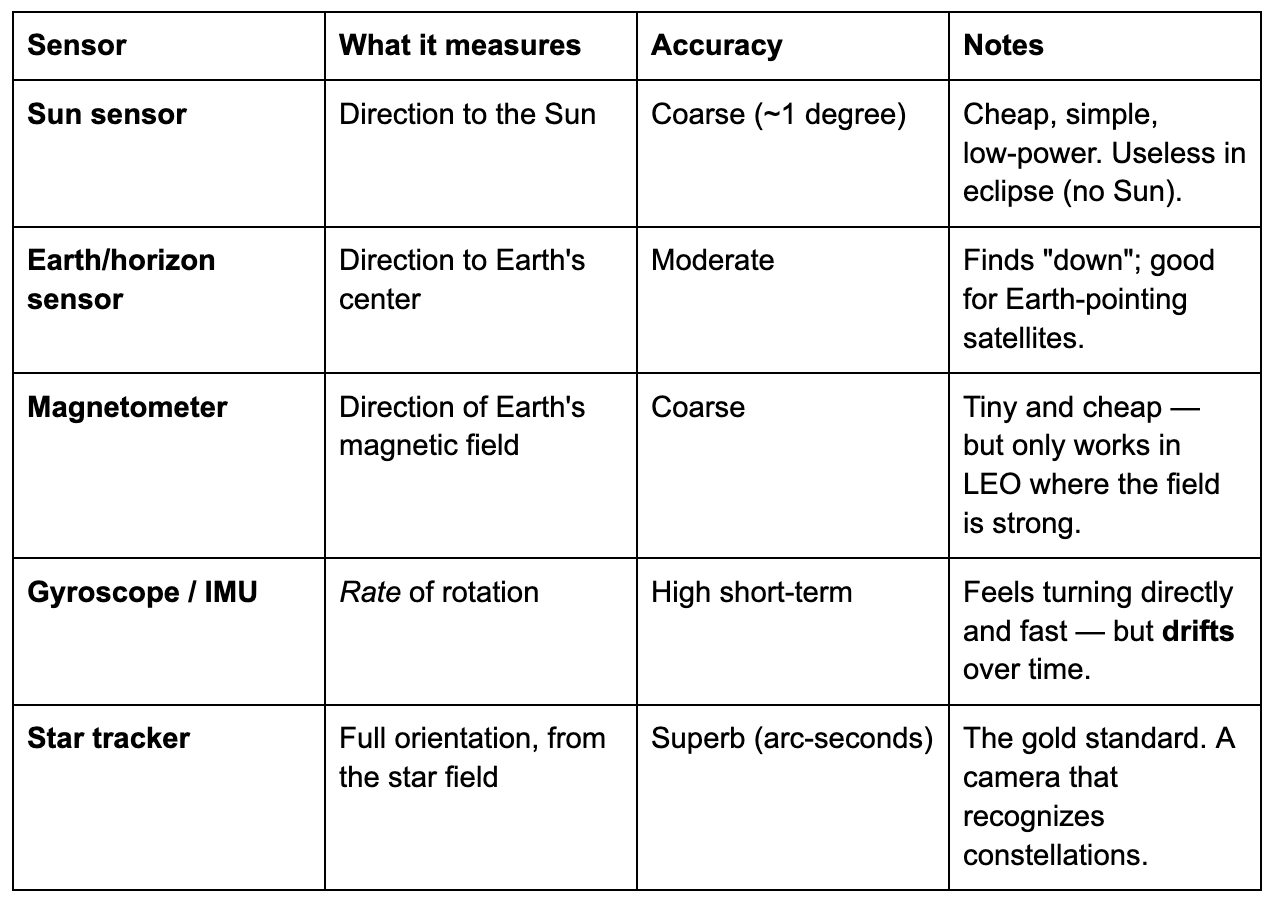
Now the second question — orientation. A satellite carries a suite of sensors, each with its own strengths, and it blends them. Here’s the lineup, from coarse-and-cheap to precise-and-pricey:
A few of these deserve a word:
The gyroscope is special because it doesn’t measure orientation directly — it measures how fast you’re turning. Add up (integrate) that rate over time and you get your change in orientation. The problem: tiny errors accumulate, so a gyro’s estimate slowly drifts away from truth — like trying to track your position by counting steps with your eyes closed. Accurate for a few seconds, hopeless after an hour.
The star tracker is the hero. It’s a small digital camera pointed at deep space. It photographs whatever stars are in view, then matches that pattern against an onboard catalog of thousands of stars — pattern-recognition, like face ID for the sky. Once it identifies the stars, it knows the camera’s exact orientation to within an arc-second (1/3600th of a degree). This is the same star-camera idea from the navigation section — but used purely as a compass for orientation, which is what stars are actually good for.
No single sensor is enough, though. The star tracker is precise but can be blinded by the Sun and is slow to recover if the satellite is tumbling. The sun sensor and magnetometer are crude but always give something. The gyro is fast but drifts. The solution is to combine them.

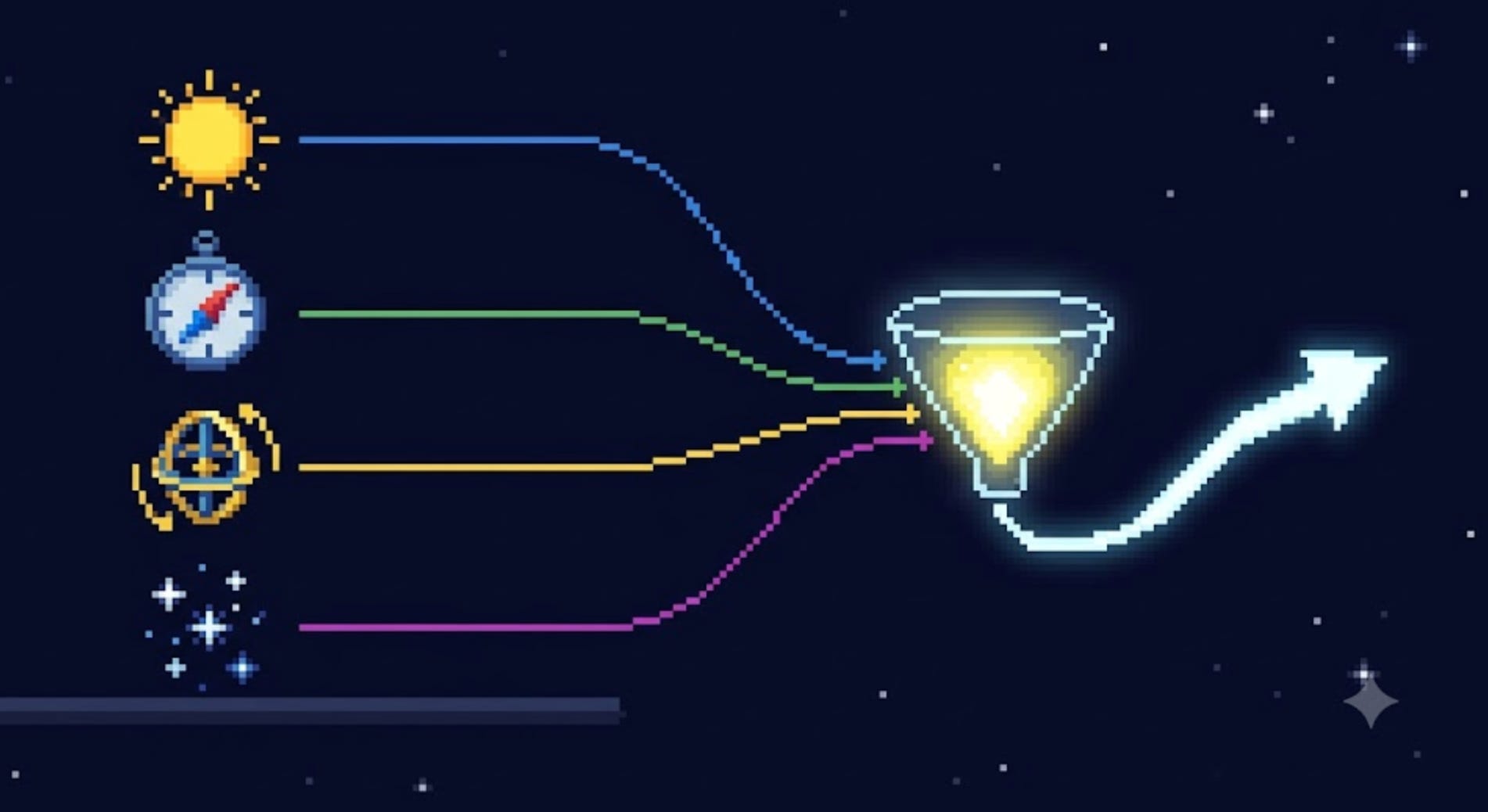
No Single Sensor Is Enough: Sensor Fusion
Real satellites don’t pick one sensor — they fuse all of them into a single best estimate, playing each one to its strength:
When a satellite first wakes up tumbling and lost, it leans on the crude-but-reliable sun sensor and magnetometer to get a rough orientation — enough to stop tumbling and find the Sun for power.
Once stable, the star tracker delivers pinpoint orientation.
Between star-tracker updates, the fast gyroscope tracks moment-to-moment turning — and because the gyro drifts, the star tracker periodically resets it back to truth. The gyro fills the gaps; the star tracker corrects the drift. Together they’re better than either alone.
The mathematical machinery that does this blending has a famous name: the Kalman filter. In one plain sentence: a Kalman filter combines a prediction of where you think you’re pointing with a fresh sensor measurement, weighting each by how much you trust it, to produce an estimate better than either. If the gyro says “you’ve turned 10°” and the star tracker says “you’re now at this exact attitude,” the filter merges them intelligently — trusting the gyro for smoothness and the star tracker for truth. It’s the same kind of math behind your phone knowing its orientation by blending its gyroscope, accelerometer, and compass.
“How Do I Turn?” The Actuators
Knowing your attitude is only half the battle. To point at something, you have to physically rotate the satellite — and there’s no ground to push against in space. So how does a satellite turn itself? Three main tools:
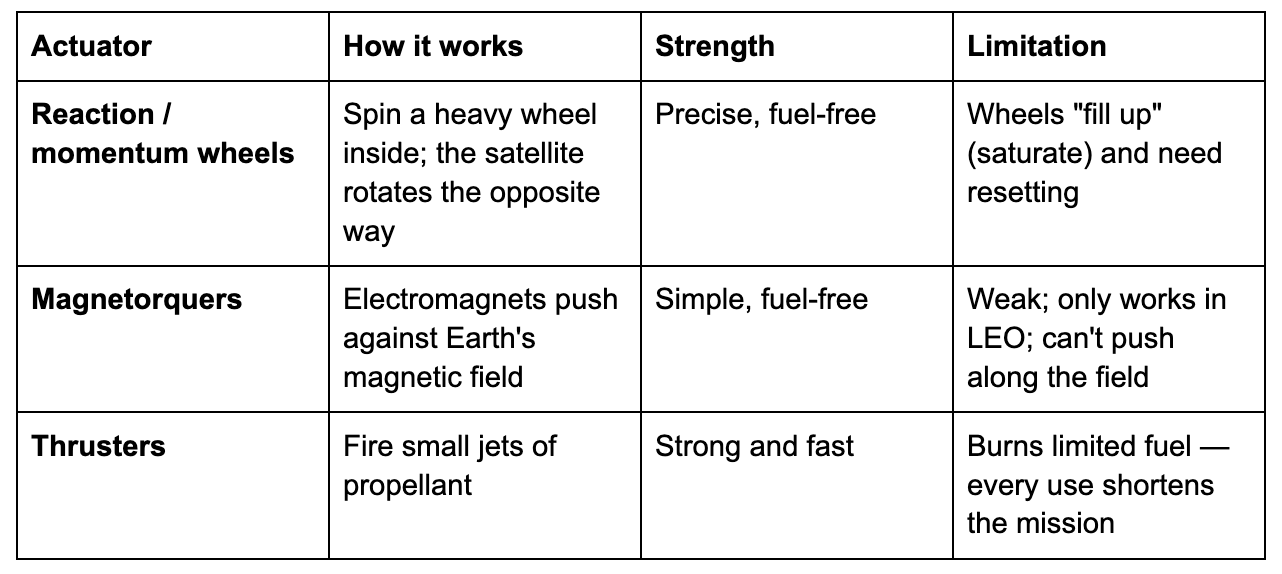
The reaction wheel is the elegant workhorse, and it runs on one of the most beautiful tricks in physics: conservation of angular momentum. There’s nothing to push against in space — so the satellite pushes against itself. Spin a heavy internal wheel clockwise, and the satellite body must rotate counter-clockwise to balance it (Newton’s third law, in spin form). Speed the wheel up or slow it down, and the satellite turns with exquisite precision — no fuel burned. Three wheels (one per axis) let a satellite point anywhere.
But there’s a catch: the saturation problem. Every time the satellite fights a persistent nudge (like atmospheric drag or sunlight pressure always pushing the same way), its wheels have to spin a little faster to compensate. Eventually they hit their maximum RPM — “saturated” — and can’t speed up any more. They’re full. To empty them, the satellite uses magnetorquers or thrusters to hold itself steady while it slows the wheels back down — a maneuver called desaturation or “momentum dumping.” It’s like a figure skater who can only spin up so fast before they have to reach out and touch the wall.
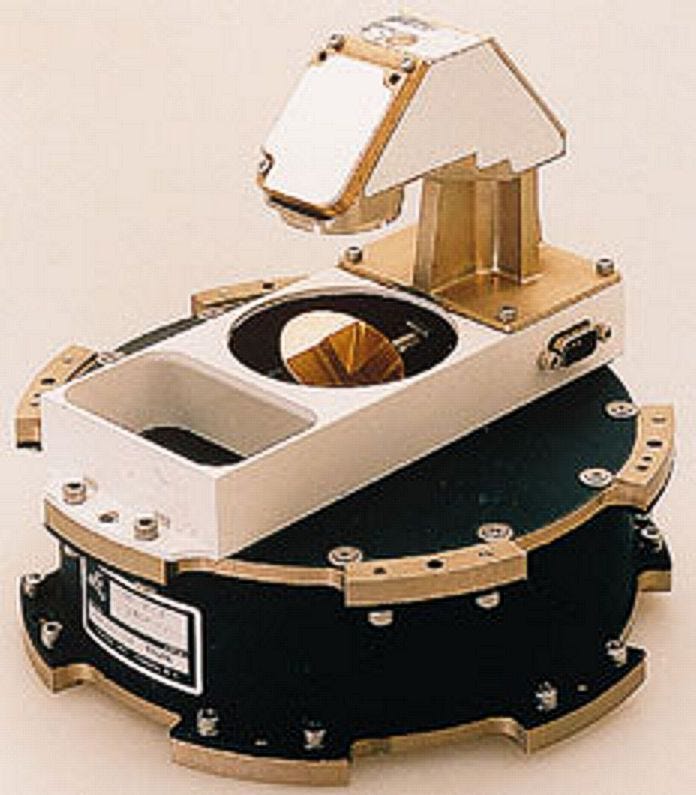
Magnetorquers are simple electromagnets. Switch them on and they push against Earth’s magnetic field — the same way a compass needle twists to align with it. Free and reliable, but weak, and only useful in LEO where the field is strong (which is also why they can’t help a deep-space probe).
Thrusters are the brute-force option: fire a jet, get a fast, powerful turn or an actual change in orbit. But every puff spends propellant the satellite can never refill, so thrusters are rationed carefully — used for big maneuvers and saved for when wheels and torquers aren’t enough.

Putting It Together: The Control Loop
Sensors tell you where you’re pointing. Actuators let you turn. The thing that ties them into purposeful behavior is the control loop — the satellite’s sense of balance, running silently many times per second:
Determine — fuse the sensors into a best estimate of current attitude.
Compare — measure the error: the gap between where it’s pointing and where it wants to point.
Command — tell the actuators how hard to push to shrink that error.
Act — wheels spin, torquers pulse, the satellite rotates a hair.
Repeat — measure again, correct again, forever.
This is the exact same loop as balancing a broom on your palm: your eyes sense it tipping (determine), your brain notes which way and how far (compare), and your hand slides to catch it (command + act) — over and over, faster than you consciously think. A satellite does this with its sensors, its computer, and its wheels, holding a telescope dead-steady on a galaxy a billion light-years away. Determine, compare, command, act, repeat — that loop is the heartbeat of every pointed satellite in space.

Why Any of This Matters: Pointing Modes
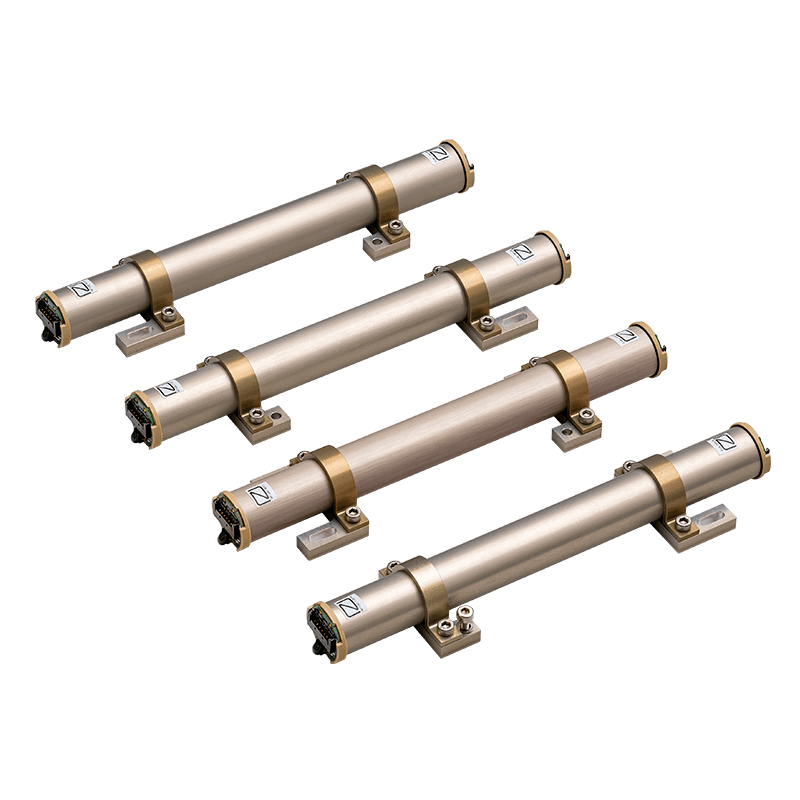
All this machinery exists so a satellite can point precisely — and what it points at changes by the minute. Common pointing modes:
Sun-pointing — keep the solar panels square to the Sun. Without it, the battery dies. This is the first thing a satellite does after deployment and the safe fallback if anything goes wrong.
Nadir-pointing — aim straight “down” at the Earth. Essential for imaging cameras, weather sensors, and communications antennas that must stay locked on a ground station.
Target tracking — slew to keep a specific spot (a city, a storm, a wildfire) centered in a camera’s view as the satellite races overhead at 7.8 km/s. The satellite has to physically rotate to counter its own motion.
Inter-satellite laser pointing — the most extreme case of all. As covered in the previous post on getting data down from space, two satellites linking by laser must hold a pencil-thin beam on a target thousands of km away, both moving at ~7.8 km/s. That’s the “Acquisition, Tracking & Pointing” problem — and it’s pure attitude control pushed to its absolute limit.
Get pointing wrong and everything fails at once: panels miss the Sun (no power), antennas miss the ground (no data), cameras smear (no usable images). Attitude control isn’t a nice-to-have — it’s the difference between a working satellite and an expensive tumbling brick.
When It Goes Wrong: Tumbling and Safe Mode
Things break in orbit, and a satellite that loses its bearings is in mortal danger — drifting panels mean a dead battery within hours. So satellites are built to fail gracefully.
The universal fallback is safe mode: if the satellite gets confused, detects a fault, or starts tumbling, it abandons whatever it was doing, uses its crudest reliable sensors (sun sensor, magnetometer) to find the Sun, and rotates to keep its panels charged — then waits, like a flower turning to the light, for operators on the ground to diagnose and recover it. Survival first; mission later.
The hardware fails too. Kepler, the planet-hunting telescope, relied on four reaction wheels to hold its ultra-steady stare; one failed in 2012, a second in May 2013, and with only two working wheels it could no longer point precisely enough — ending its original mission. (Engineers brilliantly resurrected it as “K2” by using the pressure of sunlight itself as a third virtual wheel.) Hubble’s decades-long gyroscope battles, mentioned earlier, are the same story. This is why satellites carry more sensors and actuators than they strictly need — redundancy is survival.
AI Eyes: How Inspector and Servicing Satellites Navigate by Camera
Everything so far has been about a satellite locating itself against the Earth and the stars. But a new class of satellites faces a harder problem: finding another satellite and flying right up to it.
These are inspector and servicing satellites — spacecraft that rendezvous with another satellite to photograph it, repair it, refuel it, or drag it out of orbit. And here the old tools fall apart. GPS tells you your position, not your target’s. A star tracker tells you which way you’re facing, not how far away that tumbling, uncooperative satellite is or which way it’s spinning. For the last few hundred meters of a close approach, there’s only one good option: look at the target with a camera, and let AI make sense of what it sees.
Vision-based pose estimation. A neural network watches the camera feed and continuously estimates the target’s 6-DOF pose — its three position coordinates and its three orientation angles — frame by frame. It’s conceptually like your phone detecting how far away a face is and which way it’s turned, except the “face” is a tumbling rocket body and the lighting is brutal: blinding direct sunlight on one side, pitch-black shadow on the other, against a star field. Training AI to nail pose under those conditions is the core challenge.
Visual odometry. The same camera stream also tells the chaser how it is moving — by tracking how the scene shifts between frames, it dead-reckons its own motion, like how you sense your speed from the world streaming past a car window.
AI-planned maneuvers — and the orbital paradox. Knowing where the target is, the satellite has to plan how to get there — and orbital motion is wickedly counterintuitive. To catch up to something just ahead of you in orbit, you do not speed up. Firing your thruster forward actually raises your orbit, lengthens your lap time, and makes you fall further behind. To catch up, you fire backward, dropping into a lower, faster orbit to close the gap, then rise back up to meet the target. These backwards-feeling dynamics are exactly why you can’t just hand an astronaut a joystick — an autonomous system that has internalized orbital mechanics plans the burn sequence far better than human intuition.
Why AI, not remote control? Because a human on the ground often can’t fly it: the satellite may be out of contact for most of its orbit, the final approach happens too fast and demands too much precision for a laggy remote link, and for anything beyond Earth orbit the speed-of-light delay makes joystick control impossible. The satellite has to decide for itself, in real time.
This is real and flying today:
Starfish Space’s “Otter” servicing vehicle uses a computer-vision relative-navigation system called CETACEAN to track a target’s pose in real time, and an autonomous guidance system called CEPHALOPOD to plan safe approach trajectories to satellites that were never designed to be docked with — even tumbling ones — grabbing on with a docking mechanism called Nautilus.
Astroscale’s ADRAS-J (launched February 2024) flew up to a discarded Japanese rocket upper stage — a non-cooperative object with no GPS, no markers, no help — and inspected it up close (to within about 15 meters) using cameras and angles-only navigation.
Northrop Grumman’s MEV-1 made history in February 2020 as the first vehicle to dock with a live commercial satellite (Intelsat 901) in geostationary orbit, extending its life.
And the frontier: Vision-Language-Action (VLA) AI models — like RT-2 (Google DeepMind), OpenVLA (Stanford and UC Berkeley with others), and pi-0 (Physical Intelligence) — fold perception, planning, and motor control into a single neural network. Originally built for robot arms on Earth, they point toward satellites that could be told in plain terms to inspect or repair a target and figure out the rest themselves.

The Future: Satellites That Find Themselves
Where is all this heading?
Fully autonomous navigation. Satellites that determine position and attitude, plan maneuvers, and recover from faults entirely on their own — no ground in the loop.
Smarter star trackers. AI-powered “lost-in-space” star trackers that can identify their orientation from a single frame even while tumbling, recovering in seconds instead of minutes.
Formation flying and swarms. Fleets of small satellites holding precise formation relative to each other — flying as a single distributed instrument, like a telescope kilometers wide, which demands relative navigation good enough to keep them centimeters in step.
Routine servicing. The camera-and-AI rendezvous of today becoming standard: satellites refueled, upgraded, and de-orbited on demand, turning orbit from a graveyard into something maintainable.
Navigation beyond GPS. As humanity returns to the Moon and pushes deeper, the celestial and pulsar techniques move from experiments to infrastructure — and a dedicated lunar navigation system (a “GPS for the Moon”) is already on the drawing board.
The arc is clear: from Explorer 1 tumbling helplessly in 1958, to satellites that wake up lost, find themselves against the stars, and fly with intention.
Summary: How a Satellite Finds Itself, Start to Finish
Two separate questions. A satellite must always know where it is (position) and which way it’s facing (attitude) — different problems, different tools.
Position starts with physics. An orbit is a predictable fall; you fix the state occasionally and let the math propagate it forward.
Positioning sensors: onboard GPS/GNSS receivers, ground radar/telescope tracking (TLEs), ranging, and inertial dead-reckoning.
Position depends on altitude. GPS is excellent in LEO, partial in MEO, a special spillover trick at GEO, and useless beyond — where ranging, celestial, and pulsar nav take over.
Stars are a compass, not a map. A star photo gives orientation, not location; for position you need a near reference (celestial nav) or pulsar timing.
Attitude sensors: sun sensor, horizon sensor, magnetometer, gyroscope (drifts), and the arc-second-accurate star tracker.
Sensor fusion. A Kalman filter blends them — gyro for speed, star tracker for truth — into one best estimate.
Actuators turn the satellite: reaction wheels (momentum, no fuel), magnetorquers (push on Earth’s field, LEO only), thrusters (powerful, but burn fuel).
The control loop — determine, compare, command, act, repeat — is the satellite’s sense of balance.
Pointing modes (Sun, nadir, target, laser link) are why all this exists; bad pointing kills a mission.
Safe mode and redundancy keep a confused satellite alive until help arrives.
Relative navigation — AI vision estimating another satellite’s pose, plus counterintuitive orbital-mechanics maneuvering — lets inspector and servicing satellites fly right up to their targets.
A satellite is born lost — tumbling, blind, draining its battery. Everything in this post is how it answers two questions well enough to save itself and do its job: position is knowing your dot on the map; attitude is knowing which way you’re looking. A satellite has to nail both, every second, for its entire life.
This is the fourth post in our series on how space technology actually works — following What Is a Satellite?, Brains in Orbit: Edge AI on Satellites, and From Orbit to Your Screen: How Data Gets Down From Space. Up next: how satellites move, maneuver, and eventually die — the story of propulsion, orbits, and the long fall home.
Published by Player One Space | dima@playeronespace.com